

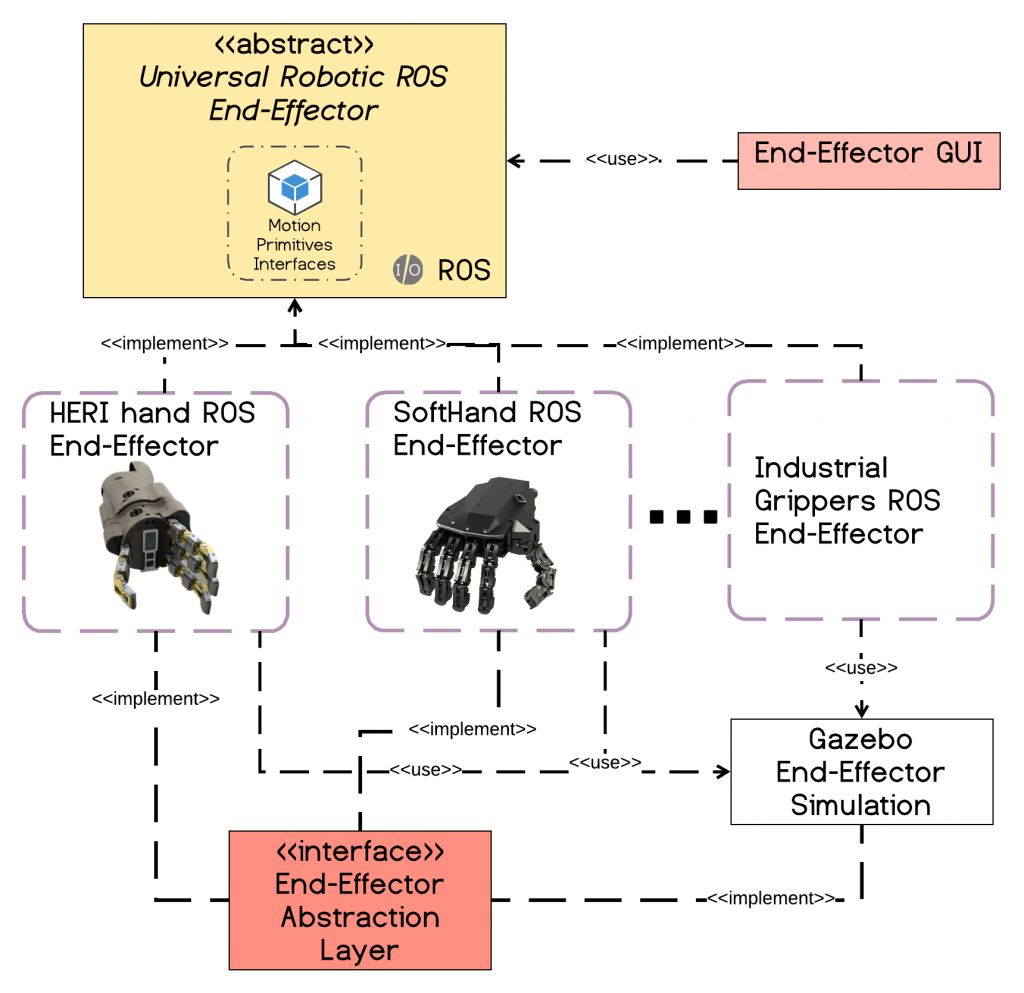
ROS End-Effector provides a ROS-based set of standard interfaces to command robotics end-effectors in an agnostic fashion.
Nowadays industrial and research end-effectors are controlled using customized software wrappers and specific frameworks: ROS End-Effectors aims to design and implement an universal ROS package capable to communicate with different end-effectors.
The project will be ROS2 compatible and will work both in simulation (Gazebo environment) and in the real hardware.
ROS End-Effector will be validated using industrial grippers and research prototypes (e.g. HERI Hand,Soft Hand), demonstrating also the integration inside a Real-Time software framework when supported by the end-effector’s fieldbus.
+++ Update January 2020 +++
You can also watch this presentation from ROS-Industrial Conference December 2019: