


1. Education Materials & Activities held according to Milestone 1
With the start of the Education Project, Inovasyon muhendislik have worked on education material preparation and Virtual Robotic Laboratory development systematically. At the first Phase, education slides have prepared for Learning Linux, ROS framework, Gazebo simulation and MoveIt applications. These slides which covers 4 different topics, have prepared in both Turkish and English Languages. These slides can be found as annexes.
For English versions:
- Annex_3_1_Linux_eng
- Annex_3_2_ROS_Training_eng
- Annex_3_3_Gazebo_eng
- Annex_3_4_MoveIt_Application_eng
For Turkish versions:
Prepared slides were used as training material in ROS practical training sessions. Inovasyon have completed 4 successful ROS training sessions and more than 60 people have attended these 4 ROS practical trainings.
In addition to these slides, A handbook for ROS learning have prepared for detailed understanding of ROS system Architecture. This book covers all the necessary information with details and provides exercises to learn about ROS architecture. Turkish and English versions of the handbook is available. These well-prepared education materials are great sources to learn ROS and ROS supported applications. Both versions can be found as:
In addition, 4 different ROS Practical Training sessions are held during the project. Each Training session lasted 2 days and more than 60 people have attended these sessions. These sessions are held in different platforms. First training held between 26-28 September in Eskişehir Osmangazi University robotics and Computer laboratories and 15 people participated these training sessions. In these training sessions, Assoc. Prof. Dr. Ahmet YAZICI and Dr. Uğur YAYAN talked about latest Robot and Autonomous vehicle technologies. Introductory level Linux and python is given first by Assoc. Prof. Dr. Metin ÖZKAN. In further, Dr. Abdullah Taha ARSLAN talked about introduction to intermediate level ROS applications and gave examples. With these applications, participants have learned about ROS structure and continued with Gazebo integration. Second day included the activities of real robot mapping, robot arm usage, visualization and realization of navigation package by Research Assistant Sezgin SEÇİL. At the end of the training Q&A session is held and participants have provided feedback about first training activity. First training session is published with details in news section and session report is available at:
https://www.rosin-project.eu/ros-training-turkey – Annex_6_1st_practical_training

– Fig 1. First ROS Practical training, September 26-28, 2019 –
Second ROS practical training held in 24-25 December in Eskişehir Osmangazi Technopark education saloon. Total 15 people have participated these 2-day sessions. According to first training feedback, Linux education and python part revised and more interactive trainings are prepared. These sections are explained by Didem ÖZÜPEK TAŞ. Additionally, detailed ROS environment, ROS structure, catkin creation and TurtleSim applications explained by Dr. Uğur YAYAN. Second ROS practical training session is also published with details in news section and session report is available at:
https://www.rosin-project.eu/ros-training-turkey-2 – Annex_7_2nd_practical_training

– Fig 2. Second ROS Practical training, December 24-25, 2019 –
Due to covid-19 pandemic, Third ROS practical training sessions are held online platform between May 11-12. Total 18 people are attended online. Enhancements of robots and autonomous systems, Linux basics and code development parts in Linux are given by Dr. Ugur YAYAN. Didem ÖZÜPEK TAŞ explained following ROS and Gazebo parts. In order to prevent problems in applied trainings, extended Q&A sessions is done in both days. Report for 3rd training is given as annex file: Annex_8_3rd_practical_training
– Fig 3. Third ROS Practical Training, May 11-12, 2020 –
Fourth ROS practical Training also held in online platform in June 1-2 with total 17 participants from different sectors. With feedback from previous trainings, in this training, only necessary Linux information are explained to minimize confusion and important points are explained by Dr. Ugur YAYAN. Additionally, general information about Mobile Robots and Autonomous Carriers and autonomous mobile robot navigation packages are explained by Didem ÖZÜPEK TAŞ. After Q&A fourth ROS applied trainings course is finished. Detailed report for 4th training is given as annex file: Annex_9_4th_practical_training
– Fig 4. Fourth ROS Practical Training, June 1-2, 2020 –
2. Virtual Robotic Laboratory for ROS learning Development for Milestone 2
For this Milestone Inovasyon has developed Virtual Robotic Laboratory (UPlat) which is capable for unlimited trainer usage at the same time. Uplat can be reached with given link: https://www.theuplat.com
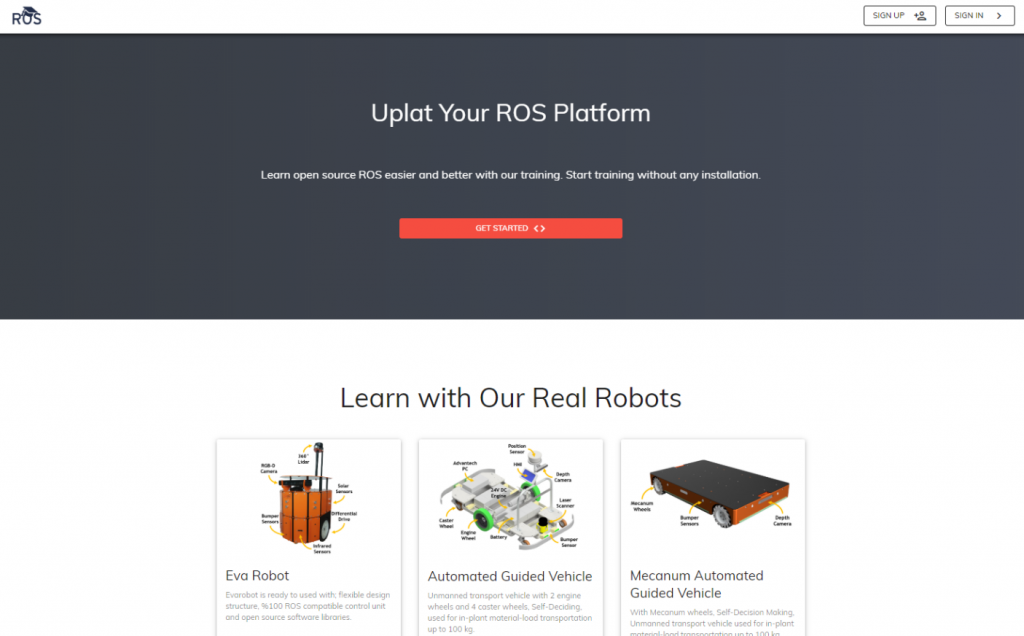
– Fig 5. UPlat Main Page –
Developed Virtual Robotic laboratory for provides ROS trainings without having pain installing Linux. Web based UPlat laboratory provides easy and fast ROS and Gazebo platform that easing learning processes. User are able to learn ROS and try their codes with using UPlat virtual robotic Laboratory. With provided course content, users are able to practice their courses in simple web-based user interface.
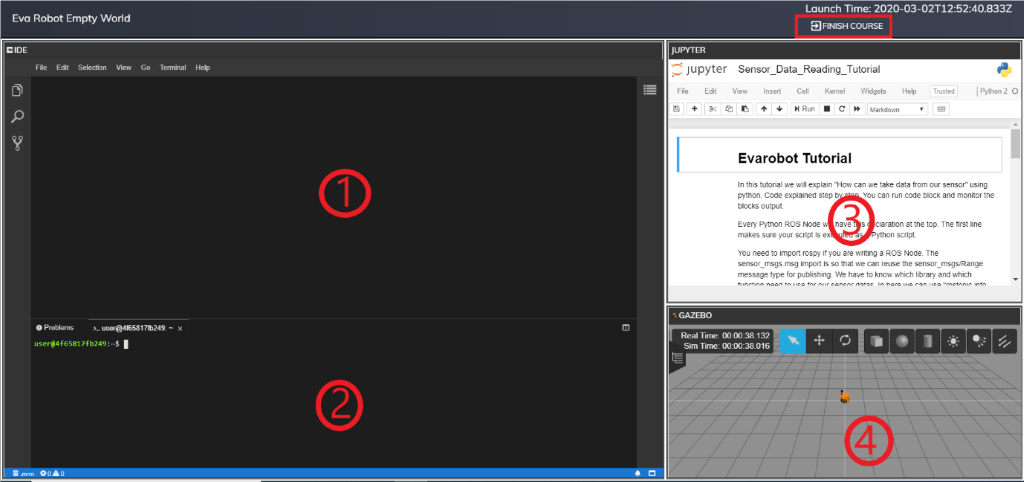
– Fig 6. Sample Training Application with UPlat –
Uplat user manual has prepared to eliminate problems and confusions while using platform. Also, Overall system and included technologies are also provided. Uplat User manual and system overview reports are available as annexes:
Outputs of these milestones which are slides, handbook and Uplat Virtual Robotic Laboratory provide sustainable ROS education and enabling individual ROS learning processes. At the end of the EP. These sources will continue educating individuals in future. Maintenance and updates to Uplat Virtual Robotic Platform will extend education processes and provide more detailed trainings.
Bildquellen
- Calisma_Submit_4: Bildrechte beim Autor